|
|
|
Demoledor (II)
|
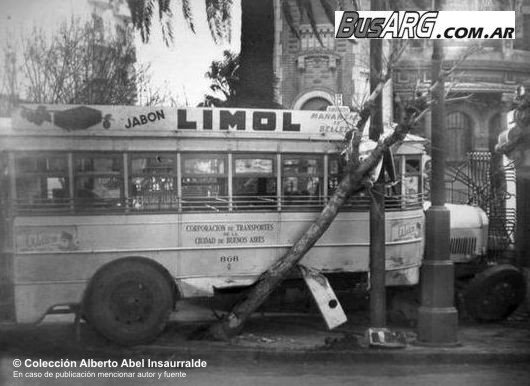
Cuando los viejos ómnibus de preguerra tenían algún accidente o desperfecto mecánico que los descontrolara, había que agarrarse: podían tirar abajo cualquier construcción que se atravesara en su camino. Si algo amortiguaba el golpe (como el árbol, en el caso de esta foto) los daños disminuían, pero estos ómnibus han llegado a demoler casas. Y eso que en esa época eran fuertes...
La imagen nos muestra a un Brockway carrozado por C.A.T.I.T.A. ex La Central, ya en manos de la Corporación de Transportes y al servicio de la línea 29, que al modernizar sus unidades a fines de los '40 se transformó en el ómnibus 129, que a fines de 1968 fue fusionado con la 406 y hoy es parte de la línea 86 (el ramal "Por Laguna")
|
|
| Rate this file (current rating : 0 / 5 with 1 votes) |

|

|

|

|

|

|











* No existían los materiales livianos y resistentes que hay ahora, y todos los motores y estructura eran de hierro, acero y otros metales; también se usaban maderas muy duras y pesadas; los únicos plásticos disponibles eran las resinas fenólicas como la baquelita, que se usaban en muy pocas aplicaciones (interiores de carrocería) y también eran pesadas. En la década de 1940 no había ningún auto que pesara menos de una tonelada.
* Las calles y caminos de la época requerían vehículos muy sólidos que soportaran las constantes vibraciones y sacudidas. Hasta la década de 1960 había muy pocas calles y avenidas asfaltadas en Buenos Aires; la mayoría estaban adoquinadas.
* Los vehículos se construían para durar. A precios actuales eran carísimos, y los repuestos eran a menudo difíciles de conseguir. Pese al maltrato, al exceso de uso y al poco mantenimiento, ómnibus como el de la foto duraron mas de veinte años en servicio.
La realidad es que no había tantos accidentes --bastantes menos que ahora. Las velocidades eran mas bajas (un auto a mas de 40 km/h en zona urbana era raro y mal visto), los vehículos menos ágiles (o sea, menos propensos a hacer maniobras riesgosas), la densidad del tránsito muchísimo menor, y casi no había estacionamiento que comprimiera la circulación. Se manejaba con otro cuidado, sabiendo que los pavimentos no ayudaban a frenar, casi todas las calles eran de doble mano, ni había un solo semáforo. También el gasto de combustible era muy alto y las velocidades óptimas de consumo bastante bajas.
Por otra parte, aún vehículos tan potentes y pesados tenían sus puntos frágiles. Uno de ellos eran las puntas de eje, situación que perduró por décadas hasta que se generalizaron las suspensiones independientes.
Imaginaba que una comparación lineal no sería posible porque muchas variables han evolucionado guiando la evolución de los vehículos en sí. Por suerte, como imaginaba, del intentar esa comparación se iban a desprender datos que tal vez no sabría ni como preguntarlos o quizá nunca se me hubiera ocurrido preguntar; excelente oportunidad para conocer mas acerca de los colectivos que hace unos cuantos años me gustan!!!.
Hasta la década del 60, la fuerza aplicada en el volante era directamente proporcional al giro de las ruedas. Por eso es que los grandes ómnibus y hasta los trolebuses tenían volantes de gran diámetro, generalmente en posición casi horizontal y con varios rayos, de forma tal que el chofer pudiera aferrar firmemente la rueda y girarla usando los músculos de la espalda.
Diámetro y posición servían para aumentar la torque todo lo posible. Recordemos que la torque es igual a la longitud del brazo (radio del volante) multiplicado por la fuerza y por el seno del ángulo entre el volante y la rueda. Por lo tanto, cuanto mayor el radio y mas tendiera a 1 el seno (o sea, un ángulo de 90º entre el volante y la rueda), menor sería la pérdida de la fuerza aplicada en el acto de la transmisión, ya que esta llegaba al eje por simples juegos de piñones y coronas.
Y también hay que recordar que este sistema de dirección debía alterar el vector de una masa de muchas toneladas, apoyada sobre neumáticos muy duros que a su vez rodaban sobre pavimentos desparejos de escasa tracción. No era fácil.
No estoy seguro de comprender el funcionamiento de la dirección servo asistida; así que dejo esta afirmación por si alguien que sepa quiera corregirla o confirmarla: “El servo es el componente electrónico encargado de recibir los pulsos electrónicos en los que es trasformado el movimiento mecánico del volante; y en base a dicha información, controla el funcionamiento del sistema mecánico encargado del movimiento del tren delantero”.
En el caso específico de la dirección de los automotores, la utilización de servos es lo que se suele llamar "dirección de potencia" (power steering). Primero vino la dirección mecánica (1876), luego la hidráulica (1926, comercialmente desde 1951), la electrohidráulica (1965, comercial en 1990), que evolucionó en la servotrónica y en la eléctrica pura (1988, comercial en 2000). Las mas modernas entre las hidráulicas, servotrónicas y eléctricas incluyen componentes electrónicos, pero no todas.